
Isang three-phase asynchronousmotoray isang uri ng induction motor na pinapagana ng sabay-sabay na pagkonekta ng 380V three-phase AC current (phase difference na 120 degrees). Dahil sa ang katunayan na ang rotor at stator na umiikot na magnetic field ng isang three-phase asynchronous na motor ay umiikot sa parehong direksyon at sa iba't ibang mga bilis, mayroong isang slip rate, kaya ito ay tinatawag na isang three-phase asynchronous motor.
Ang bilis ng rotor ng isang three-phase asynchronous na motor ay mas mababa kaysa sa bilis ng umiikot na magnetic field. Ang rotor winding ay bumubuo ng electromotive force at kasalukuyang dahil sa kamag-anak na paggalaw sa magnetic field, at nakikipag-ugnayan sa magnetic field upang makabuo ng electromagnetic torque, na nakakamit ng pagbabagong-anyo ng enerhiya.
Kumpara sa single-phase asynchronousmga motor, three-phase asynchronousmga motormagkaroon ng mas mahusay na pagganap ng pagpapatakbo at maaaring makatipid ng iba't ibang mga materyales.
Ayon sa iba't ibang mga istruktura ng rotor, ang mga three-phase asynchronous na motor ay maaaring nahahati sa uri ng hawla at uri ng sugat
Ang asynchronous na motor na may cage rotor ay may simpleng istraktura, maaasahang operasyon, magaan ang timbang, at mababang presyo, na malawakang ginagamit. Ang pangunahing kawalan nito ay ang kahirapan sa regulasyon ng bilis.
Ang rotor at stator ng isang sugat na three-phase asynchronous na motor ay nilagyan din ng three-phase windings at konektado sa isang panlabas na rheostat sa pamamagitan ng mga slip ring, brush. Ang pagsasaayos ng resistensya ng rheostat ay maaaring mapabuti ang panimulang pagganap ng motor at ayusin ang bilis ng motor.
Ang prinsipyo ng pagtatrabaho ng three-phase asynchronous na motor
Kapag ang simetriko na three-phase alternating current ay inilapat sa three-phase stator winding, ang isang umiikot na magnetic field ay nabuo na umiikot sa clockwise kasama ang panloob na pabilog na espasyo ng stator at rotor sa kasabay na bilis n1.
Dahil ang umiikot na magnetic field ay umiikot sa n1 bilis, ang rotor conductor ay nakatigil sa simula, kaya ang rotor conductor ay puputulin ang stator rotating magnetic field upang makabuo ng sapilitan electromotive force (ang direksyon ng sapilitan electromotive force ay tinutukoy ng kanang kamay tuntunin).
Dahil sa short circuiting ng rotor conductor sa magkabilang dulo sa pamamagitan ng short-circuit ring, sa ilalim ng pagkilos ng induced electromotive force, ang rotor conductor ay bubuo ng induced current na karaniwang nasa parehong direksyon ng induced electromotive force. Ang kasalukuyang nagdadala ng konduktor ng rotor ay sumasailalim sa electromagnetic na puwersa sa stator magnetic field (ang direksyon ng puwersa ay tinutukoy gamit ang kaliwang tuntunin). Ang electromagnetic force ay bumubuo ng electromagnetic torque sa rotor shaft, na nagtutulak sa rotor upang paikutin sa direksyon ng umiikot na magnetic field.
Sa pamamagitan ng pagsusuri sa itaas, maaari itong tapusin na ang prinsipyo ng pagtatrabaho ng isang de-koryenteng motor ay ang mga sumusunod: kapag ang tatlong-phase stator windings ng motor (bawat isa ay may 120 degree na pagkakaiba sa anggulo ng kuryente) ay pinapakain ng three-phase symmetrical alternating current. , ang isang umiikot na magnetic field ay nabuo, na pumuputol sa rotor winding at bumubuo ng sapilitan na kasalukuyang sa rotor winding (ang rotor winding ay isang closed circuit). Ang kasalukuyang nagdadala ng rotor conductor ay bubuo ng electromagnetic force sa ilalim ng pagkilos ng stator rotating magnetic field, Kaya, ang electromagnetic torque ay nabuo sa motor shaft, na nagtutulak sa motor upang paikutin sa parehong direksyon tulad ng umiikot na magnetic field.
Wiring diagram ng three-phase asynchronous na motor
Pangunahing mga kable ng three-phase asynchronous na motor:
Ang anim na wire mula sa winding ng isang three-phase asynchronous na motor ay maaaring nahahati sa dalawang pangunahing paraan ng koneksyon: delta delta connection at star connection.
Anim na wire=tatlong paikot-ikot na motor=tatlong dulo ng ulo+tatlong dulo ng buntot, na may multimeter na sumusukat sa koneksyon sa pagitan ng ulo at dulo ng buntot ng parehong paikot-ikot, ibig sabihin, U1-U2, V1-V2, W1-W2.
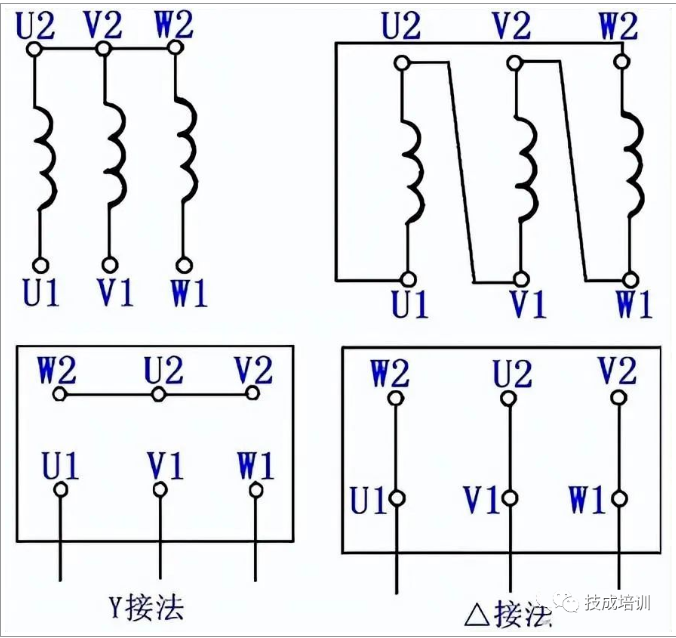
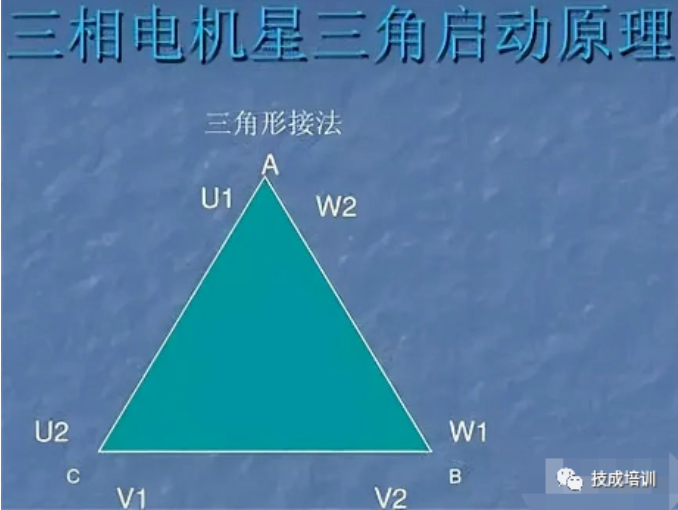
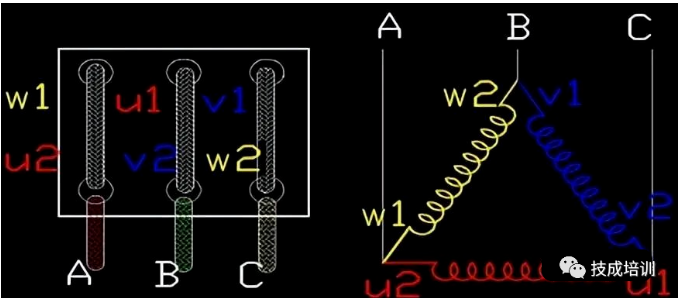
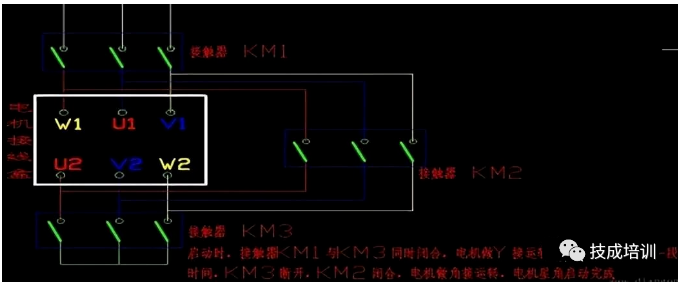
1. Triangle delta na paraan ng koneksyon para sa tatlong-phase na asynchronous na motor
Ang paraan ng koneksyon ng tatsulok na delta ay upang ikonekta ang mga ulo at buntot ng tatlong paikot-ikot sa pagkakasunud-sunod upang bumuo ng isang tatsulok, tulad ng ipinapakita sa figure:
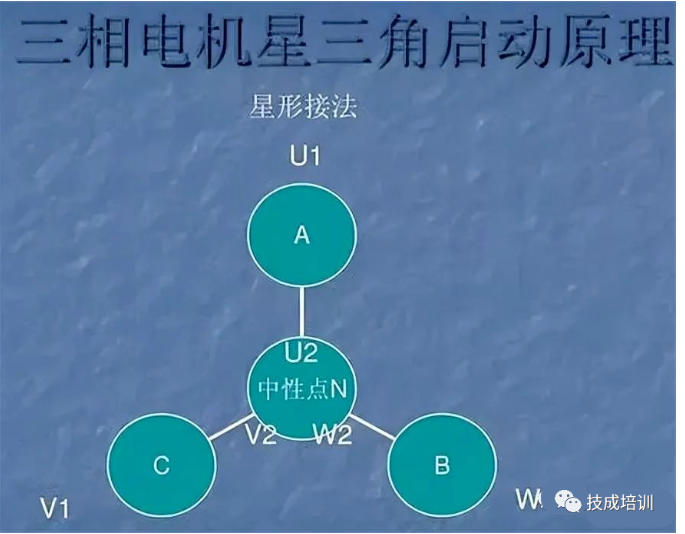
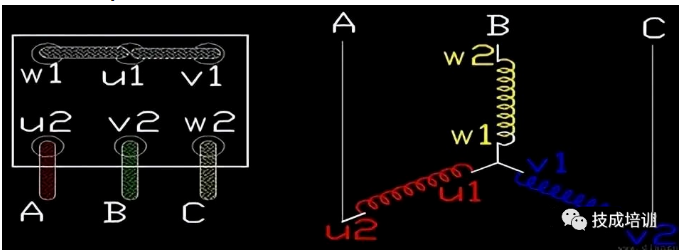
2. Star connection method para sa three-phase asynchronous motors
Ang paraan ng koneksyon ng bituin ay upang ikonekta ang buntot o dulo ng ulo ng tatlong paikot-ikot, at ang iba pang tatlong mga wire ay ginagamit bilang mga koneksyon sa kuryente. Paraan ng koneksyon tulad ng ipinapakita sa figure:
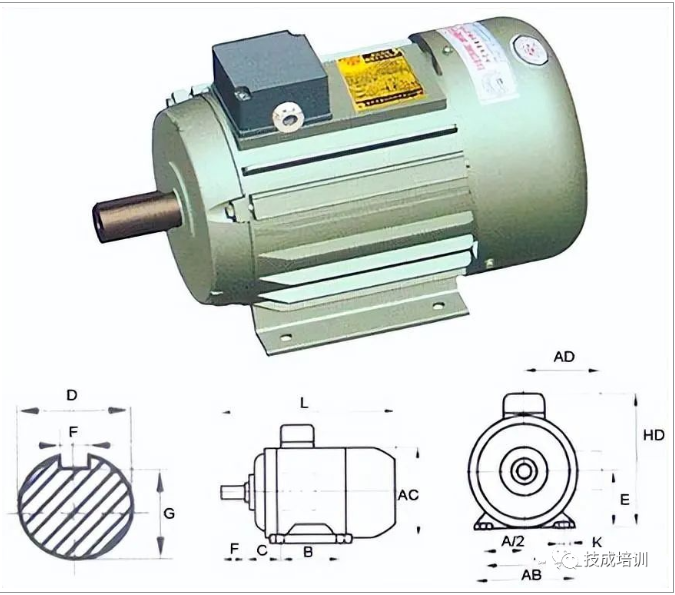
Paliwanag ng Wiring Diagram ng Three Phase Asynchronous Motor sa Mga Figure at Teksto
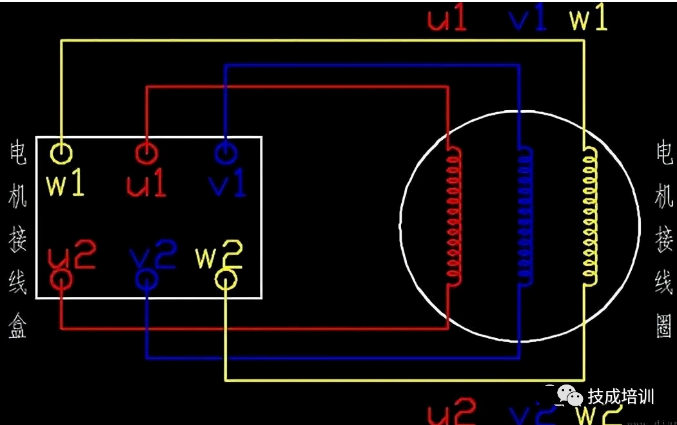
Three phase motor junction box
Kapag nakakonekta ang three-phase asynchronous na motor, ang paraan ng koneksyon ng piraso ng pagkonekta sa junction box ay ang mga sumusunod:
Kapag ang three-phase asynchronous na motor ay nakakonekta sa sulok, ang paraan ng koneksyon ng piraso ng koneksyon ng junction box ay ang mga sumusunod:
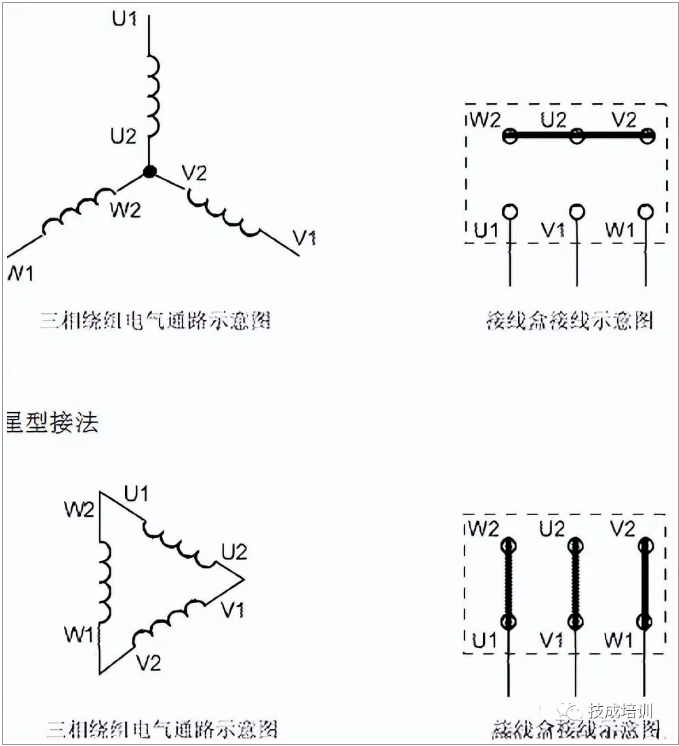
Mayroong dalawang paraan ng koneksyon para sa tatlong-phase na asynchronous na motor: koneksyon ng bituin at koneksyon sa tatsulok.
Triangulation na paraan
Sa paikot-ikot na mga coil na may parehong boltahe at diameter ng wire, ang paraan ng koneksyon ng bituin ay may tatlong beses na mas kaunting mga pagliko sa bawat yugto (1.732 beses) at tatlong beses na mas kaunting kapangyarihan kaysa sa paraan ng koneksyon sa tatsulok. Ang paraan ng koneksyon ng tapos na motor ay naayos upang makatiis ng boltahe na 380V at sa pangkalahatan ay hindi angkop para sa pagbabago.
Ang paraan ng koneksyon ay maaari lamang baguhin kapag ang tatlong-phase na antas ng boltahe ay naiiba sa normal na 380V. Halimbawa, kapag ang tatlong-phase na antas ng boltahe ay 220V, ang pagbabago ng paraan ng koneksyon ng bituin ng orihinal na three-phase na boltahe na 380V sa paraan ng koneksyon sa tatsulok ay maaaring mailapat; Kapag ang antas ng three-phase na boltahe ay 660V, ang orihinal na three-phase na boltahe na 380V delta na paraan ng koneksyon ay maaaring mabago sa paraan ng koneksyon ng bituin, at ang kapangyarihan nito ay nananatiling hindi nagbabago. Sa pangkalahatan, ang mga low-power na motor ay nakakonekta sa bituin, habang ang mga high-power na motor ay nakakonekta sa delta.
Sa na-rate na boltahe, dapat gumamit ng delta connected motor. Kung ito ay binago sa isang star konektado motor, ito ay nabibilang sa pinababang boltahe na operasyon, na nagreresulta sa pagbaba sa kapangyarihan ng motor at pagsisimula ng kasalukuyang. Kapag nagsisimula ng isang high-power na motor (paraan ng koneksyon ng delta), ang kasalukuyang ay napakataas. Upang mabawasan ang epekto ng panimulang kasalukuyang sa linya, karaniwang pinagtibay ang pagsisimula ng step-down. Ang isang paraan ay upang baguhin ang orihinal na paraan ng koneksyon ng delta sa paraan ng koneksyon ng bituin para sa pagsisimula. Matapos simulan ang paraan ng koneksyon ng bituin, ibabalik ito sa paraan ng koneksyon ng delta para sa operasyon.
Wiring diagram ng three-phase asynchronous na motor
Pisikal na diagram ng forward at reverse transfer lines para sa three-phase asynchronous na motors:
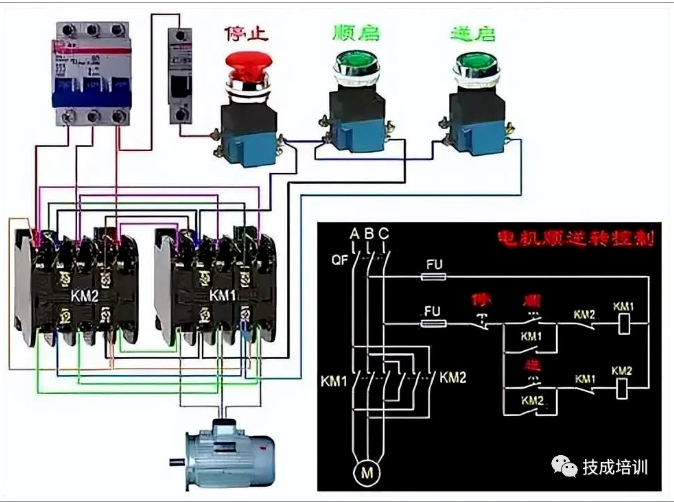
Upang makamit ang pasulong at baligtad na kontrol ng isang motor, anumang dalawang yugto ng suplay ng kuryente nito ay maaaring iakma sa isa't isa (tinatawag namin itong commutation). Karaniwan, ang V phase ay nananatiling hindi nagbabago, at ang U phase at W phase ay inaayos na may kaugnayan sa bawat isa. Upang matiyak na ang pagkakasunud-sunod ng phase ng motor ay maaaring mapagkakatiwalaan na palitan kapag kumilos ang dalawang contactor, ang mga kable ay dapat na pare-pareho sa itaas na port ng contact, at ang phase ay dapat na nababagay sa ibabang port ng contactor. Dahil sa phase sequence swapping ng dalawang phase, kinakailangan upang matiyak na ang dalawang KM coils ay hindi maaaring paganahin nang sabay, kung hindi, maaaring mangyari ang malubhang phase to phase short circuit faults. Samakatuwid, ang interlocking ay dapat na pinagtibay.
Para sa mga kadahilanang pangkaligtasan, madalas na ginagamit ang double interlocking forward at reverse control circuit na may button interlocking (mechanical) at contactor interlocking (electrical); Sa pamamagitan ng paggamit ng button interlocking, kahit na ang forward at reverse button ay pinindot nang sabay-sabay, ang dalawang contactor na ginagamit para sa phase adjustment ay hindi maaaring paganahin nang sabay-sabay, mekanikal na iniiwasan ang phase to phase short circuit.
Bilang karagdagan, dahil sa pagkakabit ng mga inilapat na contactor, hangga't ang isa sa mga contactor ay naka-on, ang mahabang saradong contact nito ay hindi magsasara. Sa ganitong paraan, sa paggamit ng mechanical at electrical dual interlocking, ang power supply system ng motor ay hindi maaaring magkaroon ng phase to phase short circuit, na epektibong nagpoprotekta sa motor at maiwasan ang mga aksidente na dulot ng phase to phase short circuit sa panahon ng phase modulation, na maaaring masunog ang contactor.
Oras ng post: Aug-07-2023


